Welcome to MimicLabs!#
Welcome to MimicLabs, your one-stop place for collecting and generating datasets for table-top manipulation! MimicLabs provides a framework for describing a suite of MuJoCo-based tasks, collecting expert demonstrations, and large-scale data generation using MimicGen.
You can use this repository to:
build your own tasks for a robot learning study
collect expert human teleoperated demonstrations
expand your datasets using MimicGen
This is also the official repository for the study paper ‘’What Matters in Learning from Large-Scale Datasets for Robot Manipulation’’ appearing at ICLR 2025.
In this repo, we leverage various open-source projects, including Robosuite, LIBERO, RoboCasa, and MimicGen. We thank their authors for making their code publicly available.
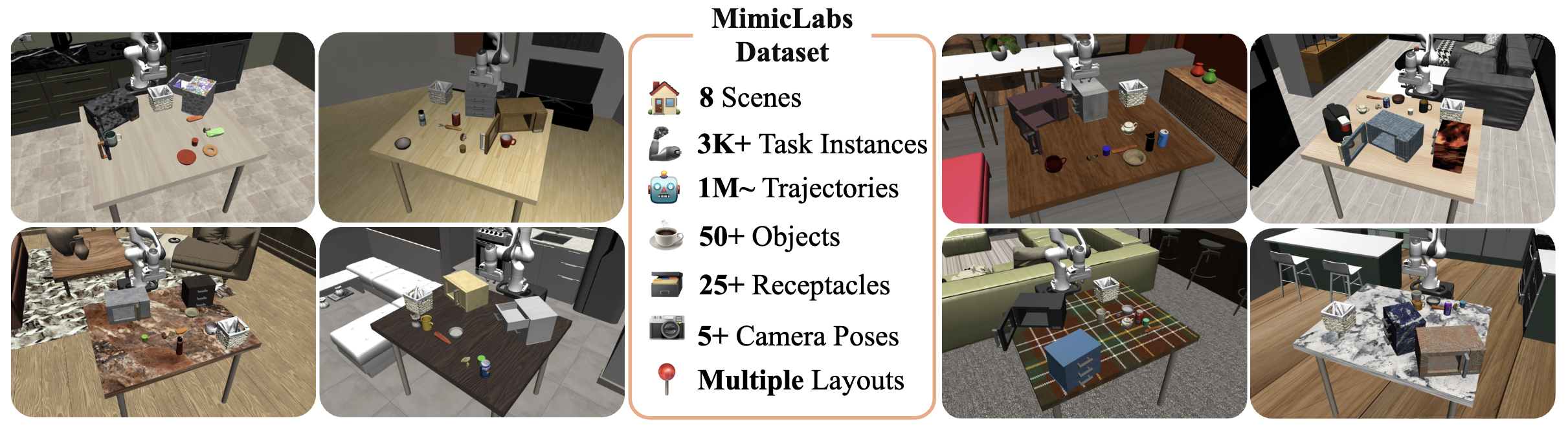
MimicLabs Dataset#
Citation#
If you find this repo useful, please cite in your work:
@inproceedings{
saxena2025mimiclabs,
title={What Matters in Learning from Large-Scale Datasets for Robot Manipulation},
author={Vaibhav Saxena, Matthew Bronars, Nadun Ranawaka Arachchige, Kuancheng Wang, Woo Chul Shin, Soroush Nasiriany, Ajay Mandlekar, Danfei Xu},
booktitle={The Thirteenth International Conference on Learning Representations},
year={2025},
url={https://openreview.net/forum?id=LqhorpRLIm}
}